整车厂如何快速实现测试设备CANFD升级?
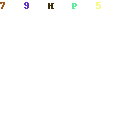
传统的汽车网络架构主要是由CAN总线组成,车内分布式电控单元ECU按照功能划分为动力总成、车身控制、辅助驾驶等总线区域;车窗、车灯、天窗等则通过LIN总线接入CAN网络。
在新一代智能网联车的浪潮下,随着车载ECU的与日倍增以及处理器运算能力和硬件的高速发展,连接ECU的网络需要更大的带宽,这一需求远超CAN等传统车载网络的容量极限。
因此,比较明确的趋势是向CAN FD过渡,CAN FD提供了64字节的数据吞吐量以及最高5Mbps的传输速率。由于车载以太网具有高带宽、低延迟、低成本的特性,在新一代整车架构中将替代CAN总线成为优选网络架构。
如图1所示,以车载以太网作为骨干网络,将核心域控制器(动力总成、车身、娱乐、ADAS)连接在一起。各个域控制器在实现专用的控制功能的同时,还提供强大的网关功能。从图 1可以发现,在各个域控制器的下方,各部件之间通讯通过CANFD来实现数据共享。
CANFD以及车载以太网的引入,使得新一代智能网联汽车整车架构上发生了较为明显的变动。要实现从传统汽车到智能网联汽车的升级,从整车生产线控制、实验室、ECU单元的设计都将做出很大的改动,其中涉及的CAN节点很多且复杂,如果全部升级为CANFD节点来实现ECU单元的设计、测试以及生产等,将会是一个比较漫长的过程。
随着新一代智能汽车的发展,很多车厂都在考虑使用CAN FD来替代CAN实现数据量传输的提速。目前各大车厂并未完全实现车载域控制,在生产线或实验室存在CAN与CANFD并存的现象,例如,新一代智能汽车ADAS系统中毫米波雷达等设备需要采用CANFD提高通讯速率,保证安全驾驶。同时,ADAS也是目前智能汽车中最为重要的一环。如图2所示,在现有的整车系统中以CAN网络为主,在调试阶段ADAS系统无法与动力控制、车身控制通讯,所以打通CAN与CANFD之间的通讯极为重要。
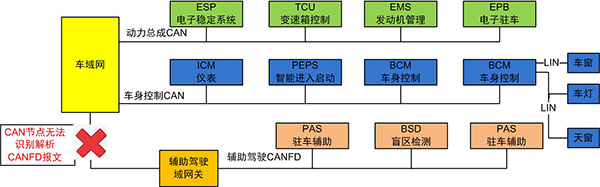
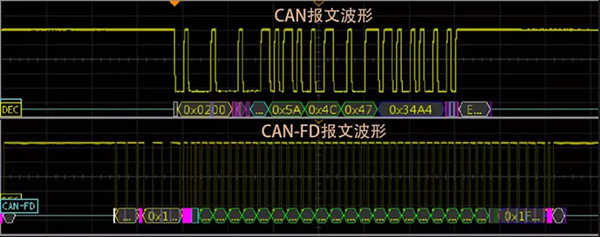
由于CANFD向下兼容CAN,而普通CAN节点无法正常解析CANFD报文。如图3所示,CAN节点和CANFD节点的波特率明显是不匹配的,CANFD最高5Mbps,进而导致通讯故障,就会一直报错,导致网络通讯异常。
那么,如何保证CAN/CANFD节点正常通讯测试,快速地升级到CAN FD呢?
一、网络中所有CAN节点升级到CANFD
这种方式虽然能够保证网络中既可以存在CAN报文也可以存在CANFD报文,但是由于整体网络全部更替为CANFD,对于前期车厂测试或生产部分单元来说,成本较高且使用率低
二、CAN节点自动忽略CANFD报文
这种方式是让网络中CAN 2.0节点不对CANFD报文进行识别,能够保证网络中不存在错误帧,但是CAN节点与CANFD节点不能进行通讯是存在的弊端,只能作为临时方案适用。
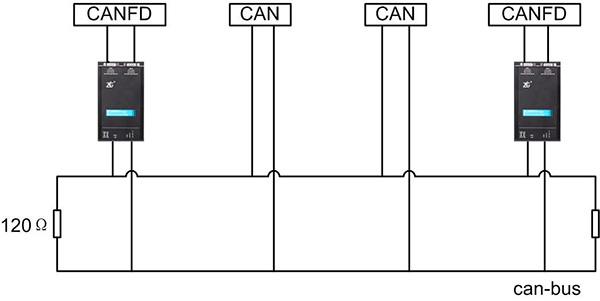
三、实现CAN与CANFD的转化
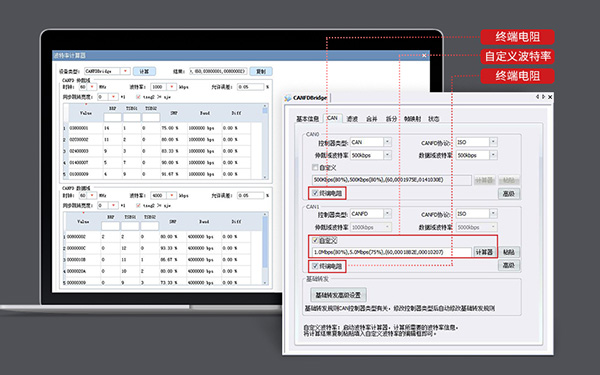
对于CAN FD的升级,如果不是全部节点都进行升级,大部分整车厂都会采用先将动力域升级成CANFD,然后再进行各个功能域的升级,所以,为了避免与CAN总线的冲突,需要首先将CAN网络与CANFD节点的通讯打通,保证在生产线或实验室能够进行通讯测试。这种情况,使用CANFD网桥作为转换来完成是更好的方法。如图4所示,工程师可以不用在意如何完成CAN与CAN FD报文之间的转换,只需要进行一些参数的配置选择,既可以实现CAN/CANFD的相互转换,也可以将工作重心放到米乐官方版m6(中国)官方网站IOS/安卓通用版/手机APP功能的实现上,降低前期测试的成本,提高使用率。
除此之外,对CANFD设备的测试、调试以及数据的读取与存储也是目前存在的痛点,面对诸如此类现象,米乐官方版m6(中国)官方网站IOS/安卓通用版/手机APP针对常用的接口,例如:USB、串口、网口、WiFi、PCIe等,推出了如图5所示一系列CANFD卡及记录仪,助力工程师完成CANFD网络和车载以太网的设计、验证、调试、故障排查以及维护。

CANFDBridge是广州米乐官方版m6(中国)官方网站IOS/安卓通用版/手机APP有限公司开发的高性能CAN/CANFD智能协议网桥。集成2路CAN/CANFD可切换接口,支持ISO标准CANFD与Bosch CANFD标准。每个接口具备独立的2500VDC电气隔离保护电路,支持设置波特率范围50K~5Mbps;支持CAN转CAN、CAN转CANFD、CANFD转CAN、CANFD转CANFD等报文默认转换处理,除此之外,具有如下特性:
- 灵活的转换组合还原数据
采用直转、合并、拆分三种方式实现传统CAN的8字节长度和CANFD的64字节长度的相互转换,无损还原原有数据。

- 支持64组ID过滤,有效过滤无需数据
每个CAN通道支持设置64组标准帧ID/标准帧组ID/扩展帧ID/扩展帧组ID的过滤配置,有效过滤无需数据,降低总线负载。

- 支持CAN ID与数据转换映射功能
CANFDBridge支持ID与数据的转换映射,可以把输入的报文进行特定ID和数据的转换输出,实现相同设备的联网接入。

- 灵活设置波特率采样点,内置终端电阻使能
CANFDBridge内置可配置的终端电阻,用户通过软件即可使能或者去除;自带自定义波特率计算器,可以计算出匹配网络的TESG1、TESG2、SJW、采样点的波特率寄存器,提高设备的适应性。
- 总线错误回传功能,提高故障预警能力
CANFDBridge具备发送错误信息回传功能,让本侧设备获知另外一侧的总线运行情况,提高故障预警能力。
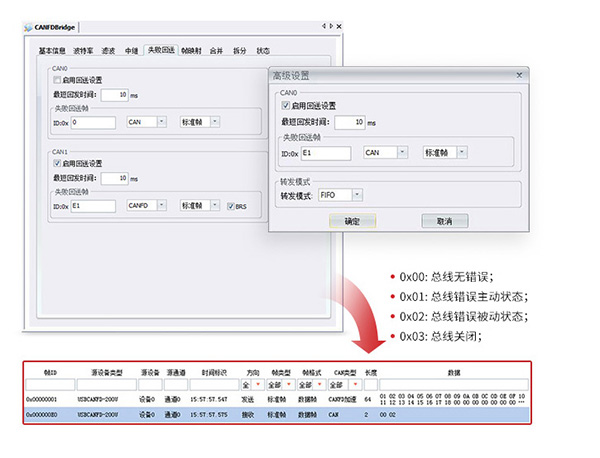
- 配置接口读取总线错误状态
通过CANFDBridge的配置接口,具备读取通讯错误状态的功能,可以方便的查找到故障的大概方向,以便于paicha 软硬件问题。

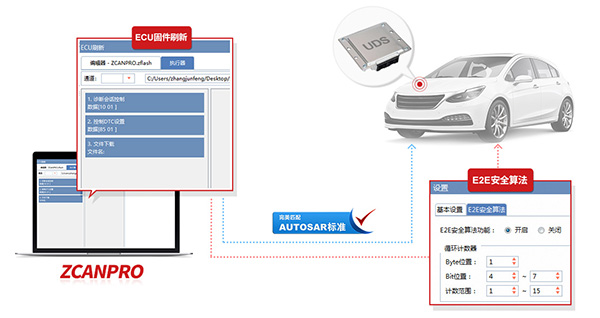
- 支持ECU刷写和E2E安全算法,完美匹配AUTOSAR标准
ZCANPRO支持ECU刷新和E2E安全算法,提供UDS协议服务,添加刷写文件并应用执行器,可轻松完成ECU数据安全快速刷新。